Funzionali
Intervista
All'inizio del progetto, il Product Owner e l'Esperto di Dominio hanno condotto un'intervista per raccogliere le informazioni necessarie a definire i requisiti funzionali utente e di sistema del progetto. L'intervista ha avuto come obiettivo principale quello di comprendere le aspettative degli utenti e le funzionalità chiave richieste per il sistema di simulazione robotica.
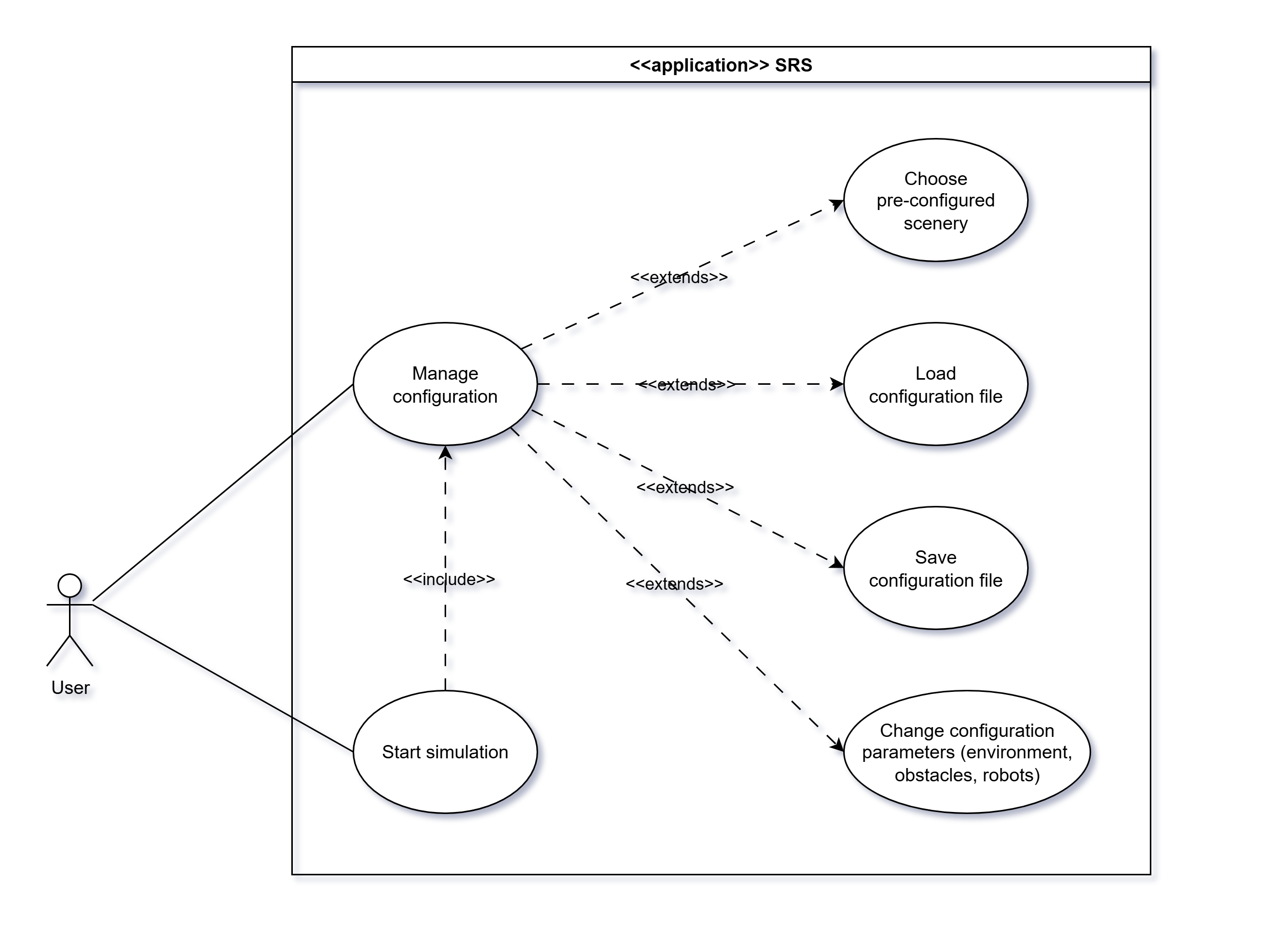
Il sistema deve consentire all’utente di gestire e configurare in modo completo i parametri della simulazione, riguardanti l’ambiente in cui operano i robot, gli ostacoli presenti e i robot stessi.
Tra le principali funzionalità richieste c’è la possibilità per l’utente di scegliere uno scenario preconfigurato che definisce la disposizione dell’ambiente, degli ostacoli e dei robot. In alternativa, l’utente potrà caricare una configurazione precedentemente salvata o salvarne una nuova, così da riutilizzarla o modificarla successivamente.
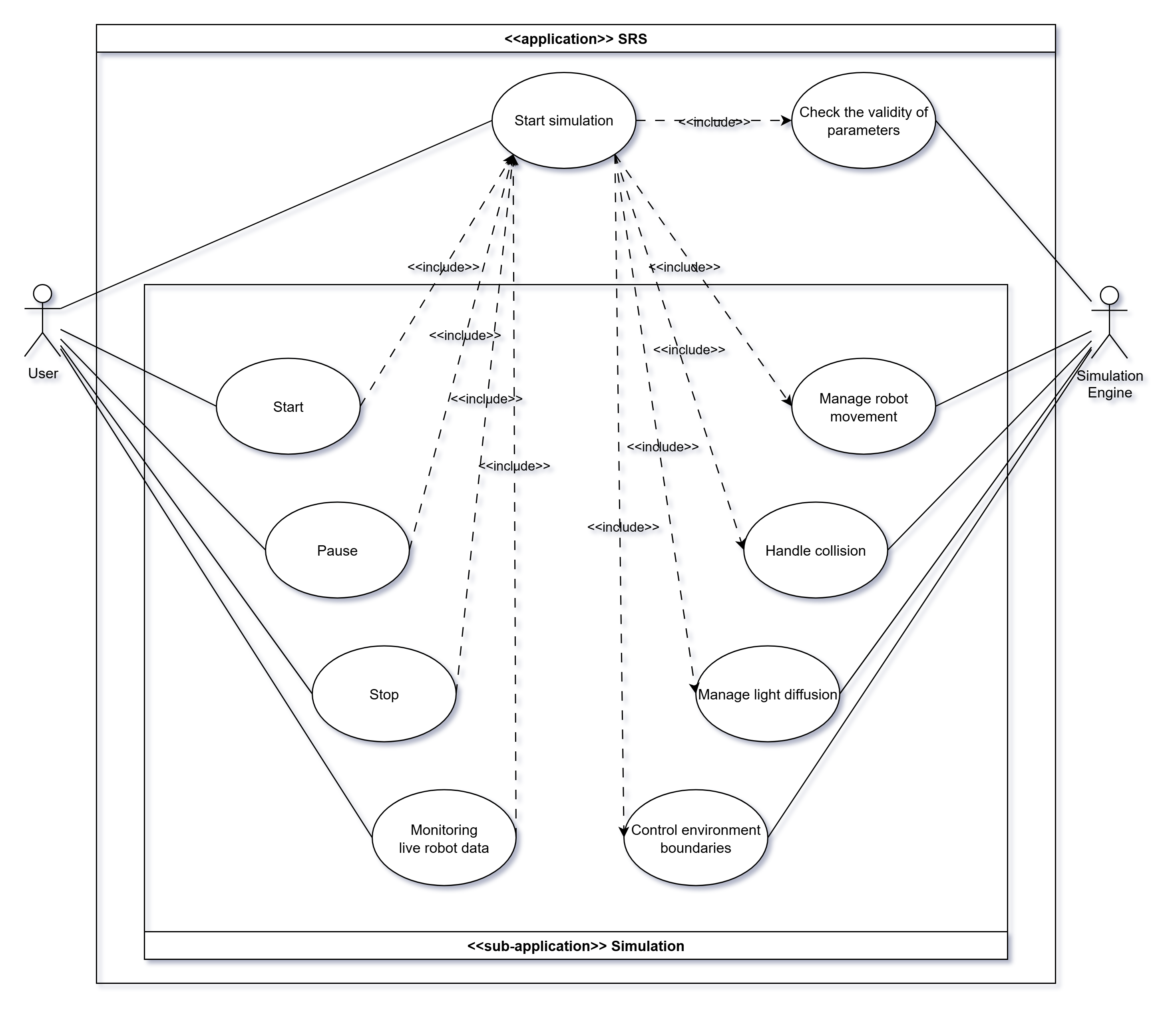
Un aspetto cruciale riguarda l’avvio della simulazione: prima di iniziare, il sistema deve verificare la correttezza e la validità dei parametri configurati dall’utente. Una volta superata questa fase di validazione, la simulazione può partire e l’utente ha la possibilità di controllarne il ciclo di vita attraverso comandi di pausa e arresto. Durante l’esecuzione, è inoltre fondamentale garantire la possibilità di monitorare in tempo reale lo stato dei robot, con dati aggiornati costantemente per consentire un controllo puntuale delle attività e delle interazioni.
Il cuore operativo del sistema è rappresentato dal motore di simulazione, che lavora dietro le quinte e si occupa di elaborare la logica della simulazione. Questo motore gestisce aspetti fisici e comportamentali fondamentali, quali il movimento dei robot, la gestione delle collisioni e la diffusione della luce nell’ambiente simulato.
Casi d'uso
Sulla base delle informazioni raccolte durante l’intervista, sono stati modellati i seguenti casi d’uso.
 |
|---|
 |
Di seguito sono riportati i requisiti funzionali, sia utente che di sistema, emersi dall'analisi dell'intervista e dei casi d'uso.
Utente
- UF-01 – Scelta di uno scenario preconfigurato;
- Gestione parametri della simulazione:
- Gestione entità:
- Gestione sensori:
- Gestione configurazione di simulazione:
- UF-13 – Avviare, mettere in pausa o fermare la simulazione;
- UF-14 – Modificare velocità di simulazione per esperimenti lunghi.
Di sistema
- Generazione entità:
- Gestione fisica:
- Logica di sistema:
- SF-11 – Eseguire simulazione CLI a massima velocità.